Travaux
Cette page présente les principaux travaux.
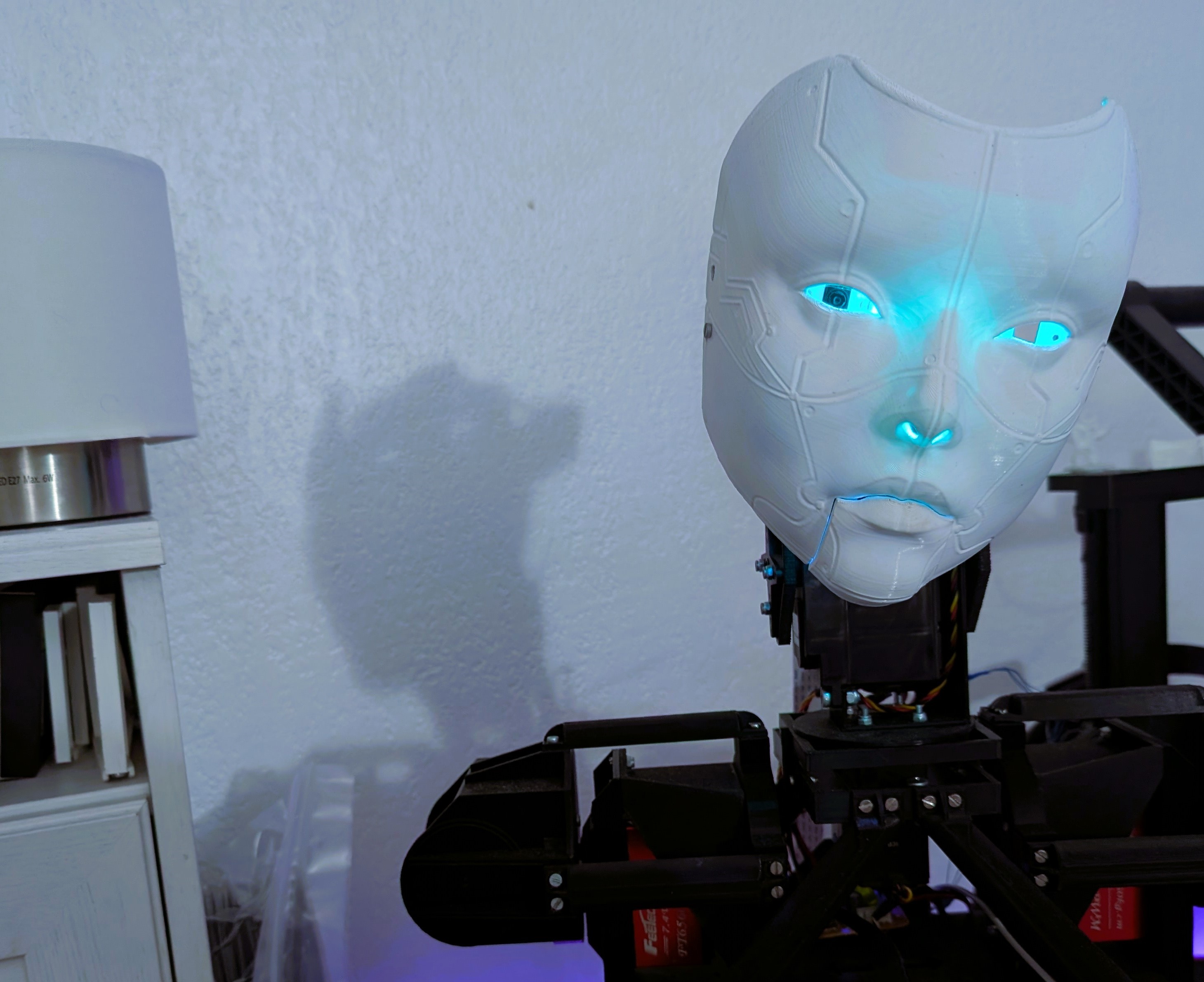
MIKASA
Robot humanoïde expérimental
Exploration de solution robotique domestique et interaction homme-machine. Focus sur la fluidité des mouvements et l'expressivité faciale.
Accéder aux travaux MIKASA
HNRI 6ASM1
Robot industriel 6 axes expérimental
Expérimentation de cinématique inverse, vision 3D par caméra stéréoscopique et optimisation de trajectoires dynamiques en temps réel.
Accéder aux travaux HNRI 6ASM1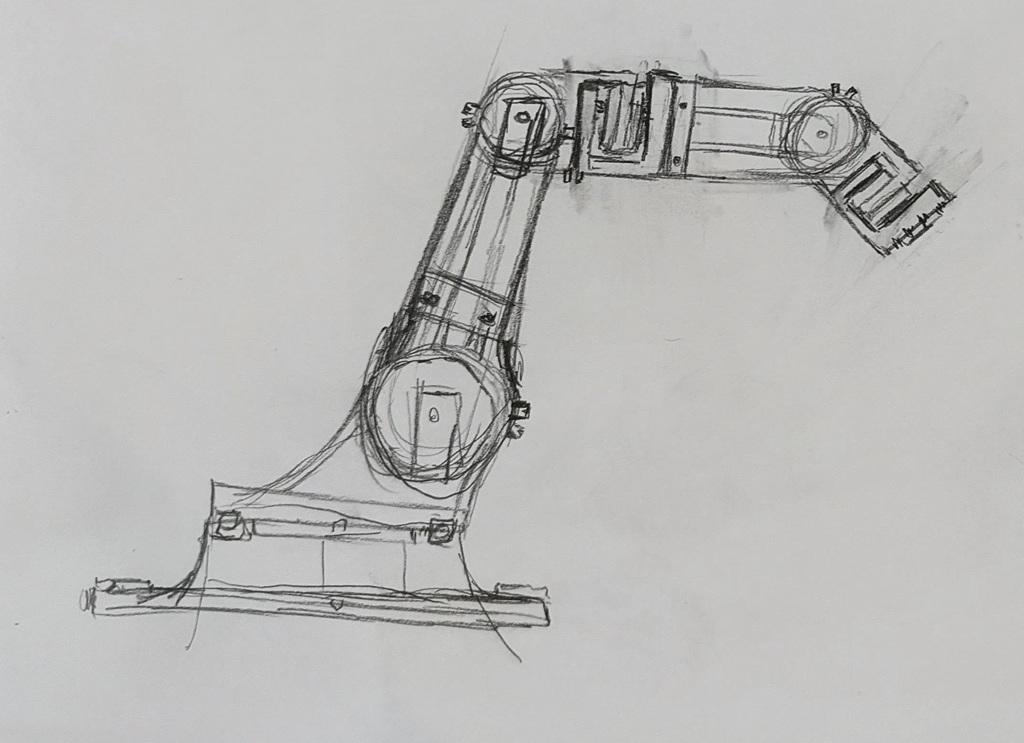
HNRI 6ASM2
Robot industriel 6 axes expérimental
Expérimentation de modèle dynamique pour précision et répétabilité a faible coût
Accéder aux travaux HNRI 6ASM2