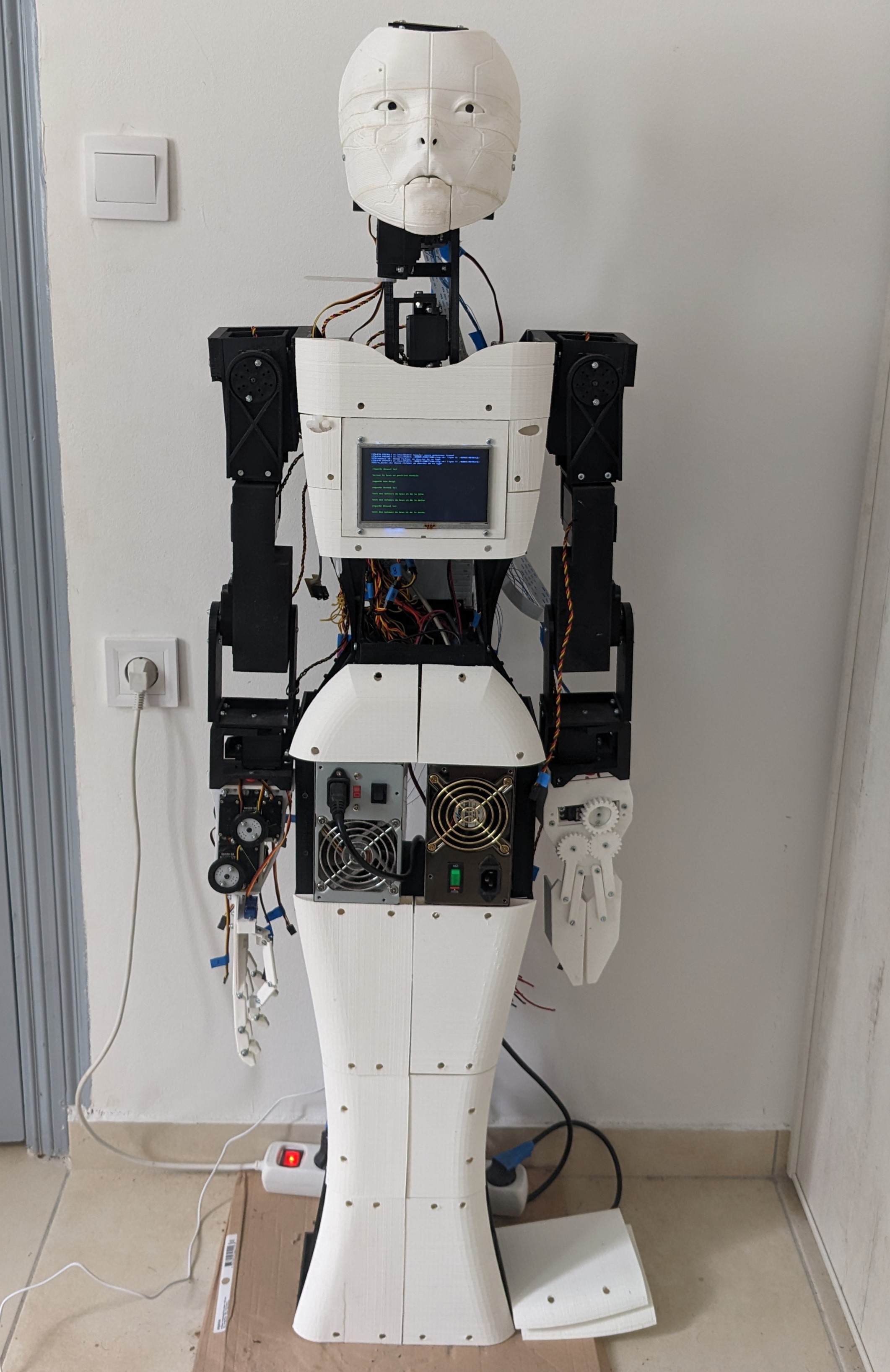
15-07-2025 : Montage de la nouvelle version du torse (V3)
MECANIQUERefonte complète de la structure du torse pour des épaules plus efficaces et un gain de place pour les systèmes embarqués.
Travaux sur un robot humanoïde, avec pour objectif:
Architecture:
Capacités avancées:
Retour en TextToSpeach via commandes vocales:
Refonte complète de la structure du torse pour des épaules plus efficaces et un gain de place pour les systèmes embarqués.
....
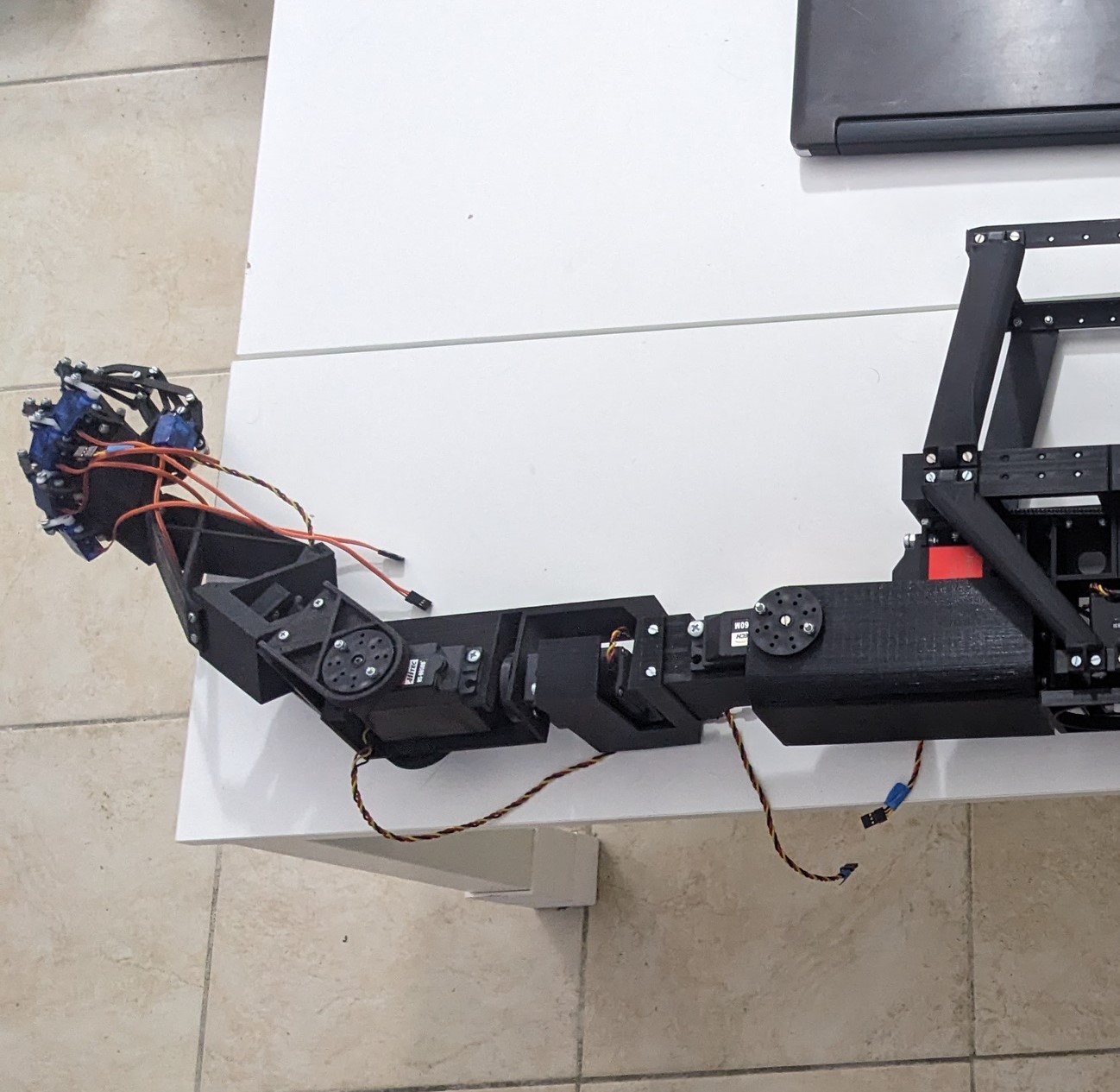
Premiers essais de mouvement des doigts sur les nouvelles mains. Validation de l'amplitude de mouvement.
Observation : Visage imprimé en une seule pièce, toujours à partir d'une version modifié de https://www.thingiverse.com/thing:4943682
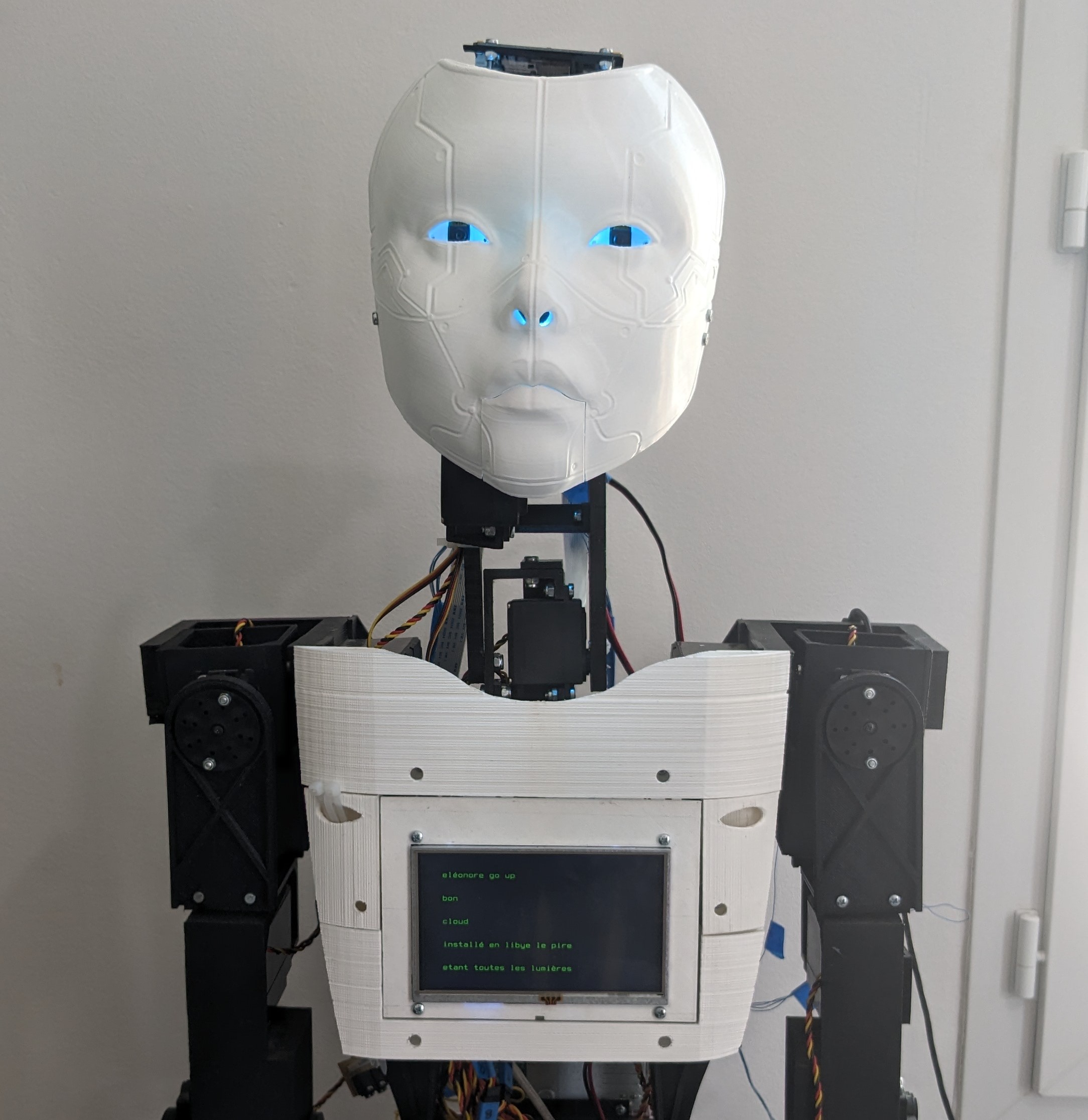
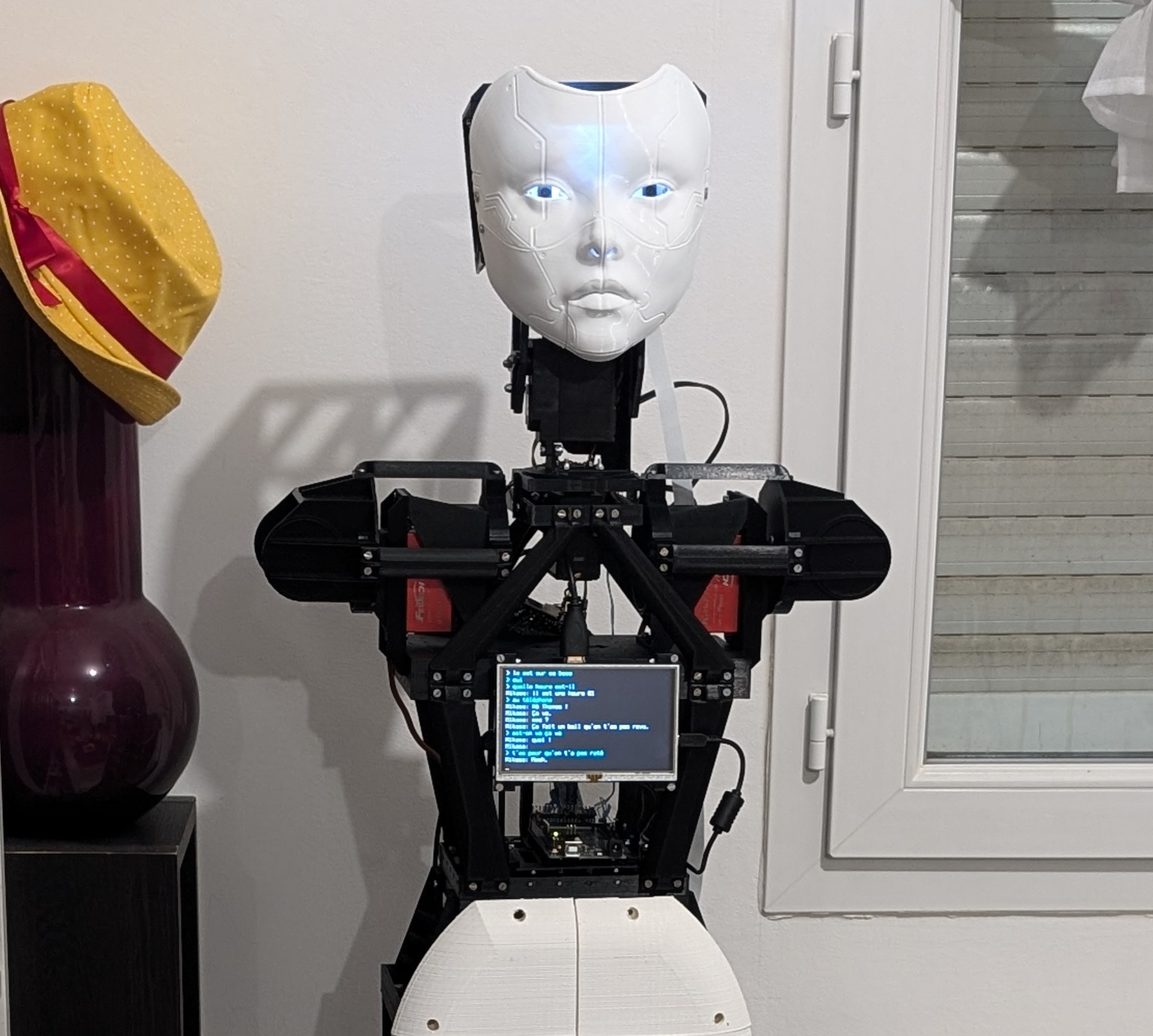
Observation : Visage moin effrayant, a partir d'une version modifié de https://www.thingiverse.com/thing:4943682
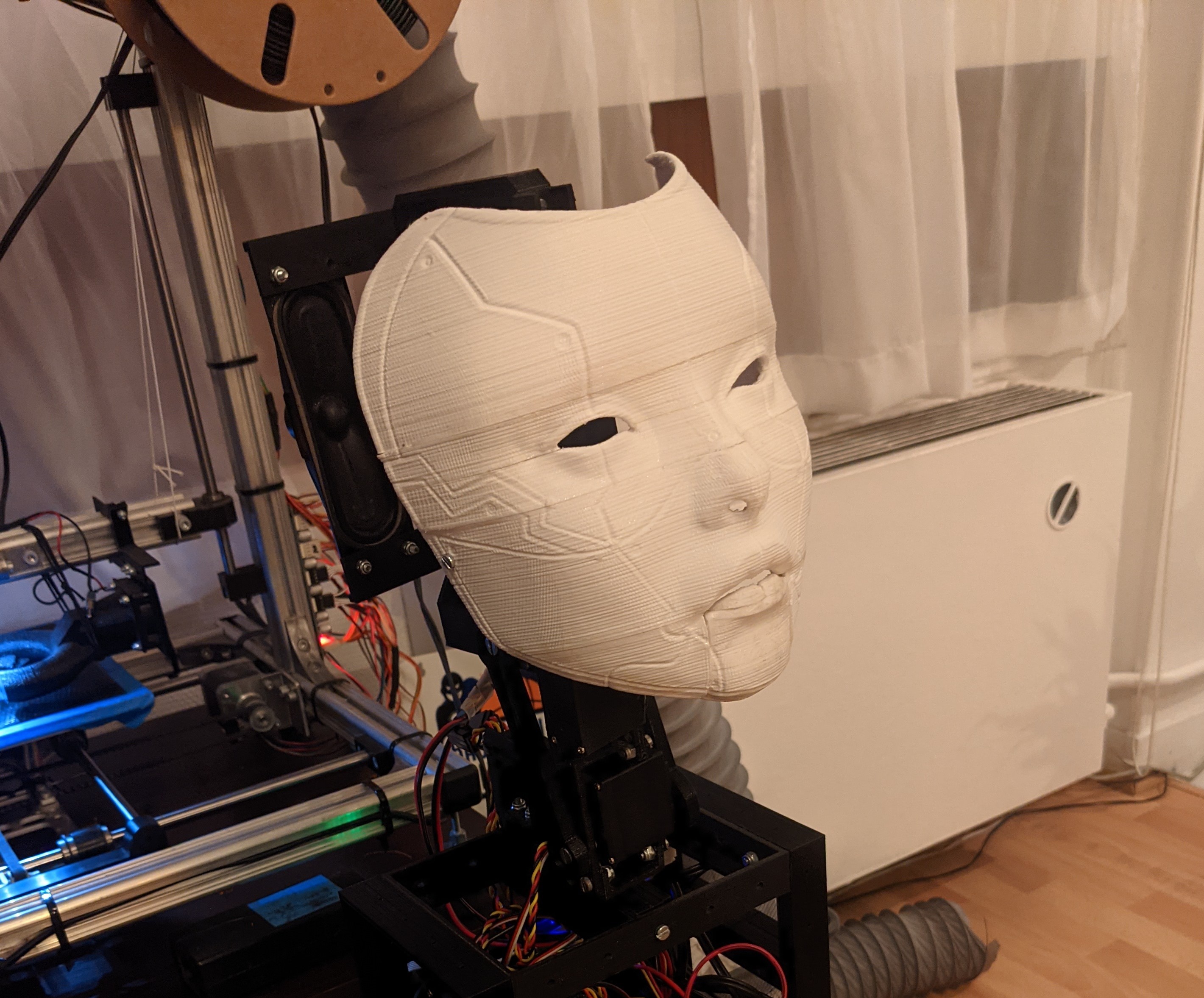
Observation : Améliore l'impression d'interraction mais effrayant, surtout la nuit...

Début du projet sous forme de contrôle vocale d'ampoules LIFX avec un micro sur un Raspberry Pi.