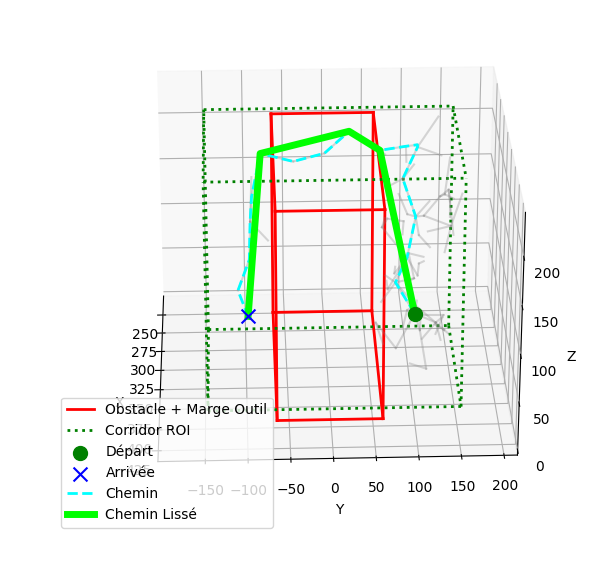
14/06/2026 - Utilisation RRT avec biais et simplification du chemin en condition réelle
LOGICIEL
Le nombre de point de passage est simplifié afin de ne garder que ceux qui permettent l'evitement de la zone de collision. Néanmoins la distance entre les points et l'utilisation de mouvements articulaires provoques de mouvements amples pouvant être dangereux.
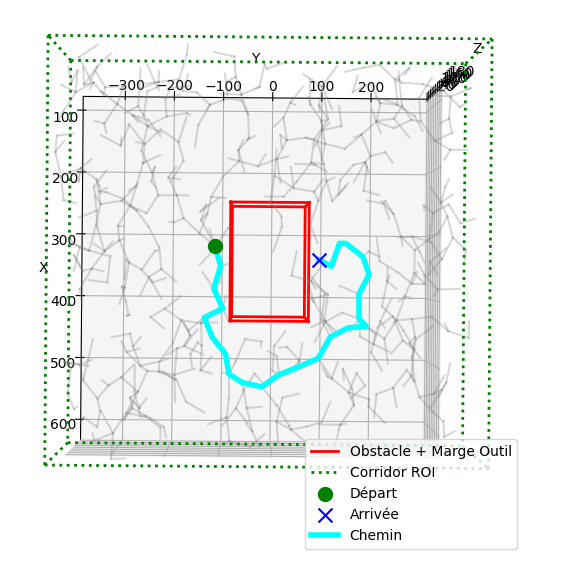
14/06/2026 - Utilisation RRT en condition réelle
LOGICIEL
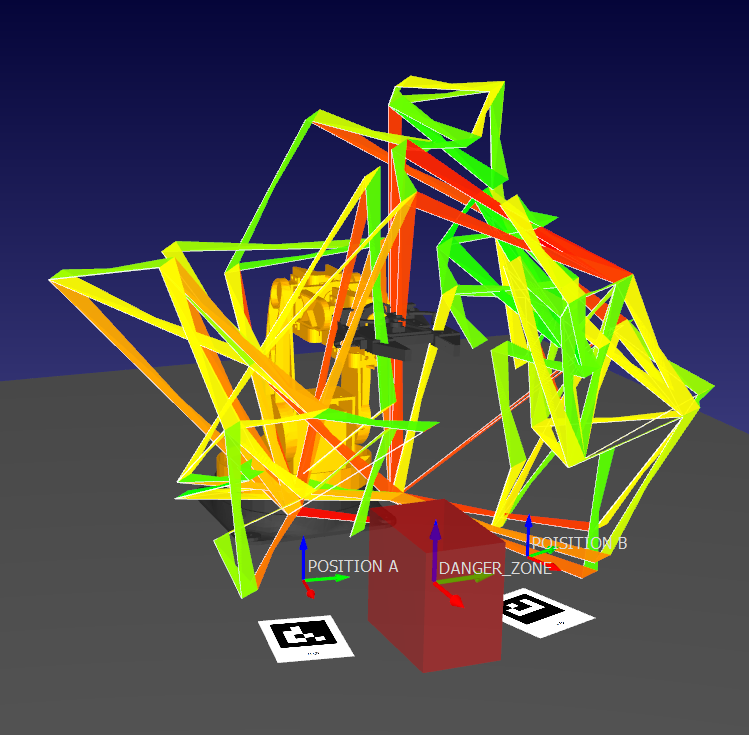
Le robot se déplace en réalisant des mouvements erratiques (zigzag) provoqués par l'exploration du RRT.
21/05/2026 - RRT biaisé (orientation de la recherche) utilisant un corridor plus étroit, un post-traitement de simplification.
LOGICIEL
21/05/2026 - RRT en Python et affichage avec Matplot.
LOGICIEL
Chemin trouvé au bout de 0.3 sec, en utilisant un corridor rejoingnant la position actuelle à la position cible.
Le chemin nécessite un post-traitement pour lisser les zigzags. Une optimisation par biais peut aider à la convergence ainsi qu'un corridor plus étroit.
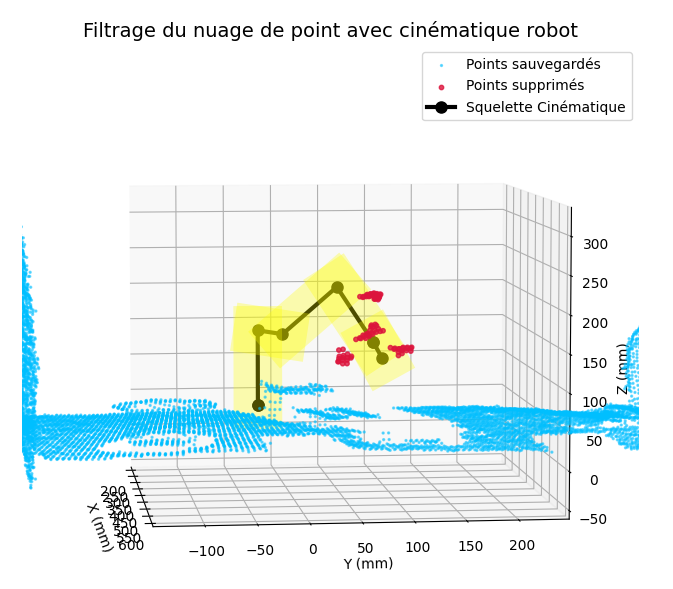
20/05/2026 - Utilisation de la position connue du bras robot pour supprimer les points générés par lui-même.
LOGICIEL
Déblocage de la situation. L'appel des algos va pouvoir se réaliser après une prise. Utilisation de MatPlot pour l'affichage.
10/05/2026 - Augmentation du nombre de points dans la vision et mise en évidence des points du bras robot.
LOGICIEL
Déblocage de la situation. L'appel des algos va pouvoir se réaliser après une prise. Utilisation de MatPlot pour l'affichage.
09/05/2026 - Problème de détection du bras robot comme obstacle par la vision
LOGICIEL
Le bras se déplaçant dans la scène génère des points et sont interprété comme un obstacle. Utilisation de MatPlot pour l'affichage.
09/05/2026 - Génération de trajectoire pour évitement de collision sur RoboDK (PRM)
LOGICIEL
En utilisant la cartographie intégérée à RoboDK, génération d'une trajectoire évitant les collisions avec la zone de collision.
Une nouvelle cartographie de l'environnement est nécessaire en cas de modification de la zone de collision.
Optimisation et exploration de stratégie pour la réutilisaiton de la cartographie à explorer.
09/05/2026 - Essai de la cartographie de RoboDK (PRM)
LOGICIEL
Le PRM permet de générer des chemins à partir d'une cartographie préalable de la scène.
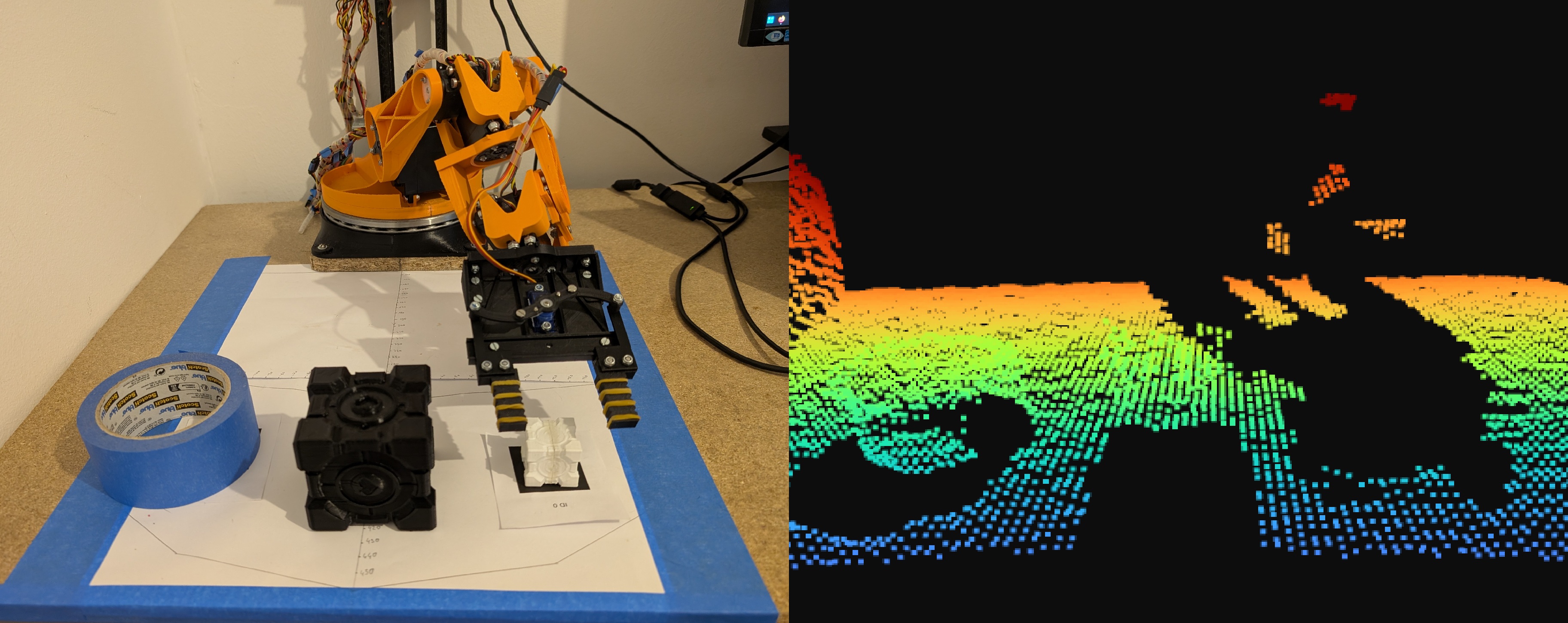
02/05/2026 - Génération dynamique d'obstacle sur RoboDK en utilisant une Kinect
LOGICIEL
Stratégie de génération d'obstacle : lorsqu'un obstacle physique est posé dans le champ de la Kinect, une "zone rouge" (cube avec echelle modifié dynamiquement) se génère dans RoboDK.
Prochaine étape : l'évitement de collision dynamique avec PRM, RRT, RRT* etc !
Utilisation de scripts python avec opend3D, stratégie voxel utilisé pour créer rapidement la zone.
02/05/2026 - Amélioration de la trajectoire avec mouvement linéaire
LOGICIEL
Remplacement des mouvements articulaires simples par des mouvements linéaires directes entre la zone de prise et de dépose.
Remarque : Ce mouvement rectiligne sera le mouvement qui devra subir des déviations dynamiques afin d'éviter des obstacles.
02/05/2026 - Suivi d'orientation rZ d'ArUco dans RoboDK
LOGICIEL
Intégration de l'orientation rZ des marqueurs ArUco. Un modèle de l'aruco dans roboDK s'adapte dynamiquement.
Bilan : Avec l'orientation, le robot s'oriente correctement et la prise de cube est plus précise.
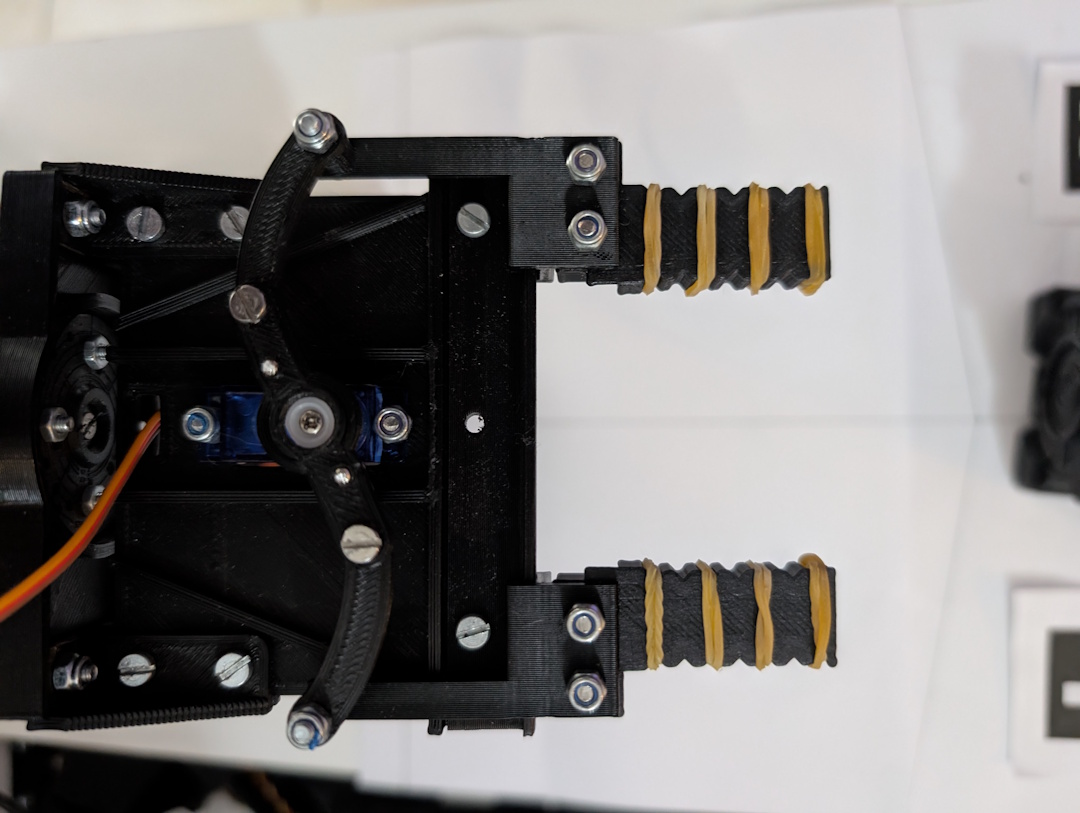
16/04/2026 - Nouveaux mors de préhension
MECANIQUE
Suite aux glissements observés lors des premiers tests de Pick & Place, de nouveaux mors ont été modélisés et imprimés en 3D. Cette nouvelle géométrie permet l'utilisation d'élastique pour la surface de contact permettant une adhésion améliorant l'efficacité de la prise.
12/04/2026 - Pick & Place : Essai avec le Cube Aperture Science
LOGICIEL & MECANIQUE
Mouvement de Pick & Place. Identification des Aruco, saisit et déplace un objet complexe (un cube Portal imprimé en 3D).
Bilan : la fluidité globale est au rendez-vous. La prochaine étape visera à optimiser les trajectoires pour l'évitement de collision et à redessiner les mors de la pince pour une préhension plus sécurisée sur ce type de géométrie.
12/04/2026 - Vision 3D dynamique avec RoboDK
LOGICIEL
Validation de la communication entre plusieurs briques (Kinect v1 détectant des cibles dynamiques via marqueurs ArUco) et l'environnement RoboDK chargé de réalisé les trajectoires.
12/04/2026 - Sécurisation de l'Axe 1
MECANIQUE
Pour pallier les problèmes de frottements et stabiliser l'ensemble du bras, la conception de l'axe 1 a été entièrement revue. Nous y avons intégré un roulement à billes massif de 170 mm logé dans une nouvelle cage imprimée en 3D, garantissant ainsi une rotation fluide, robuste et sans effort pour le moteur.
07/04/2026 - Premiers tests de préhension
LOGICIEL & MECANIQUE
Les premiers tests de préhension en mode JOG sur une simple vis M3 se sont avérés très prometteurs concernant la réactivité et la précision de notre pince.
Observations : les éléments d'articulation de l'axe 1 généraient trop de frottements pour assurer une fluidité parfaite lors des mouvements... l'axe 1 doit à nouveau être revu
08/11/2025 - Première trajectoire via RobotDK
LOGICIEL
Test de précision et de répétabilité en utilisant une trajectoire préparé et exécuté sur RobotDK.
Observations : Bonne répétabilité générale, quelques écarts probablement causé par un important jeu repéré sur l'axe 1 -> mécanique à revoir.
04/11/2025 - Premiers mouvements via RobotDK
LOGICIEL
Mise en place d'un middleware en Python utilisant l'API de robotDK pour lire et transmettre la position angulaire des servomoteurs en continu.
Observations : excellente réactivité, précision et limites d'axes à améliorer.
24/10/2025 - Assemblage du carter du Teach
Mécanique
Assemblage du carter pour le teach.
Observations : Bonne tenue, partie arrière a revoir en une pièce pour gagner en solidité.
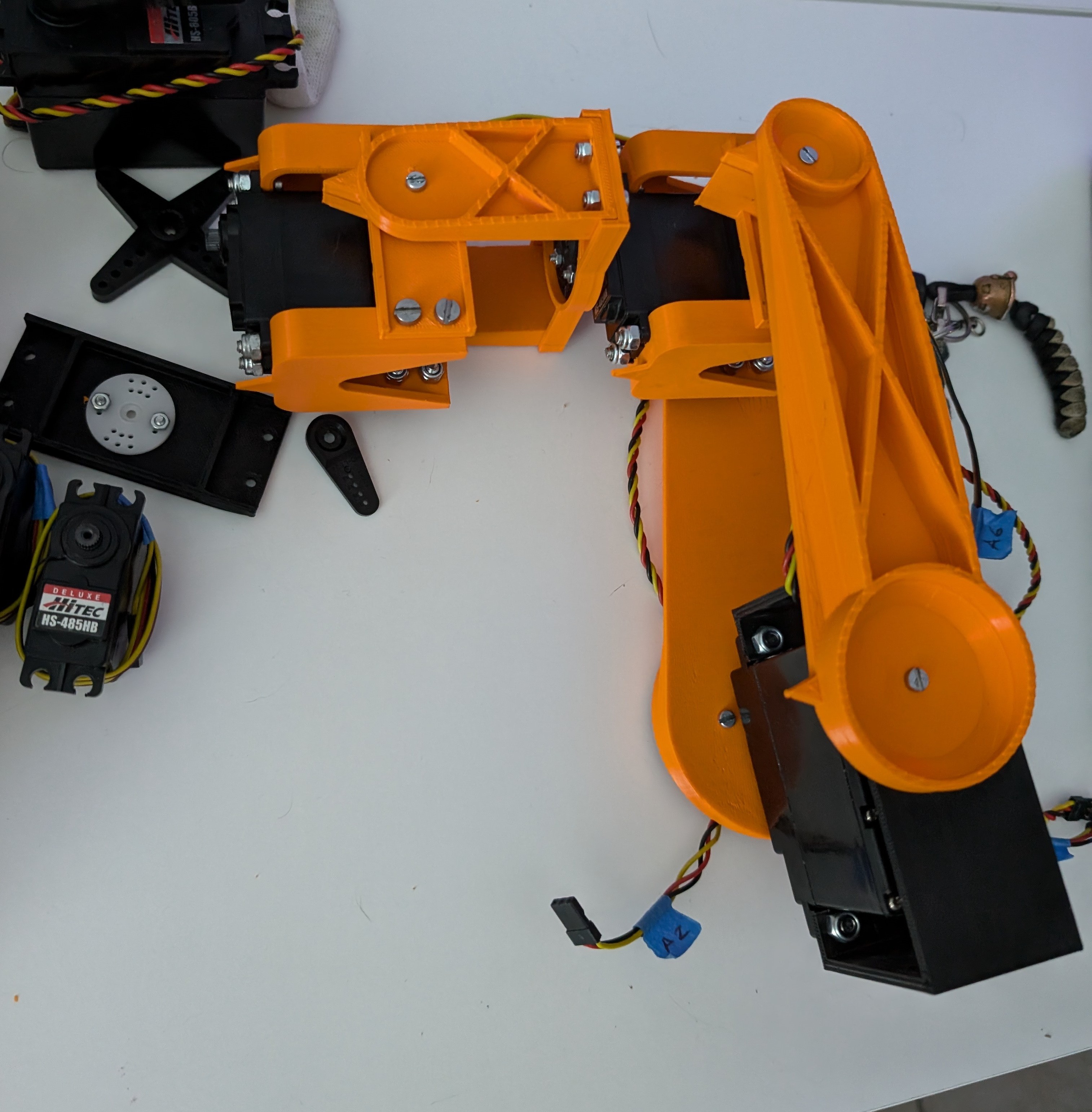
23/10/2025 - Assemblage des éléments orange
Mécanique
Remplacement des éléments précédement noir (segments) avec ajout de repère de calibration et optimisation solidité structurelle.
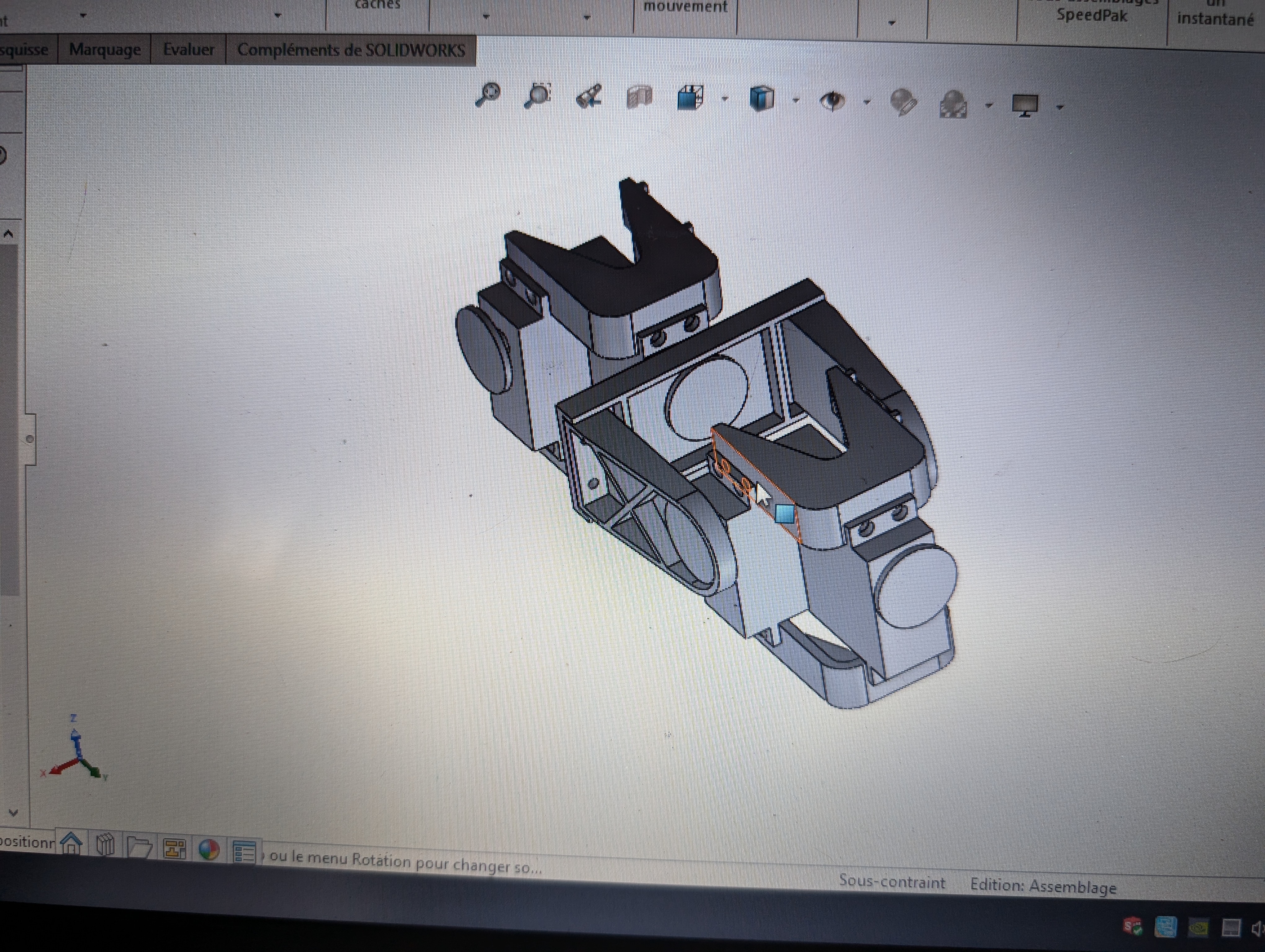
30/09/2025 - Début de conception (modélisation 3D) du robot
Mécanique
Création des éléments, avec priorisation de la réutilisation des pièces sur différentes zones pour optimisé la simplicité et la maintenance.